Currency
|
The First Multidimensional Tactile Humanoid Robot in Embodied AI industry
Connecting to a better future with a rich sense of touch at fingertips
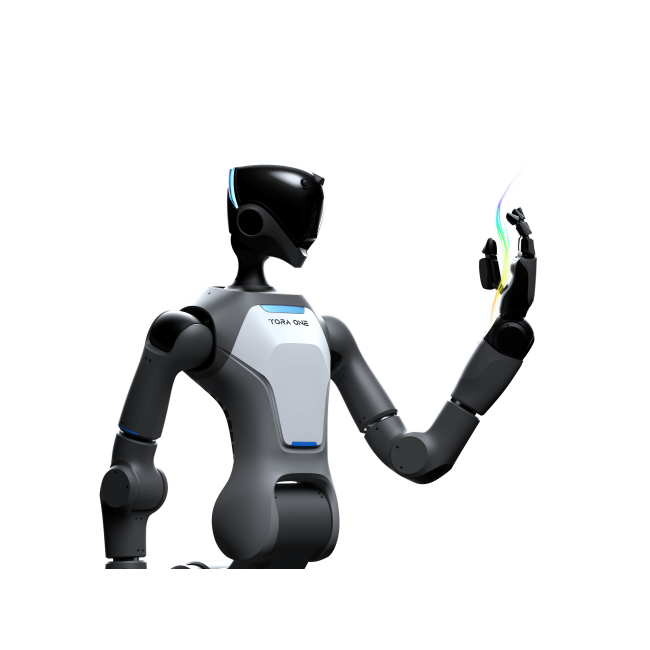
TORA ONE
The First Multidimensional Tactile Humanoid Robot in Embodied AI industry
Connecting to a better future with a rich sense of touch at fingertips
The industry's first integrated multidimensional tactile and AI vision dual-modal dexterous Hand Precise sensing, dexterous operation
2280 self-developed high-precision ITPU multidimensional tactile sensing units, 15 types of multidimensional tactile sensing, 6840 tactile signals
Dynamic adaptive height
Degrees of freedom of the body
High-precision force control
Precise force control at fingertips
Battery life
Extremely long battery life
Multimodal Model
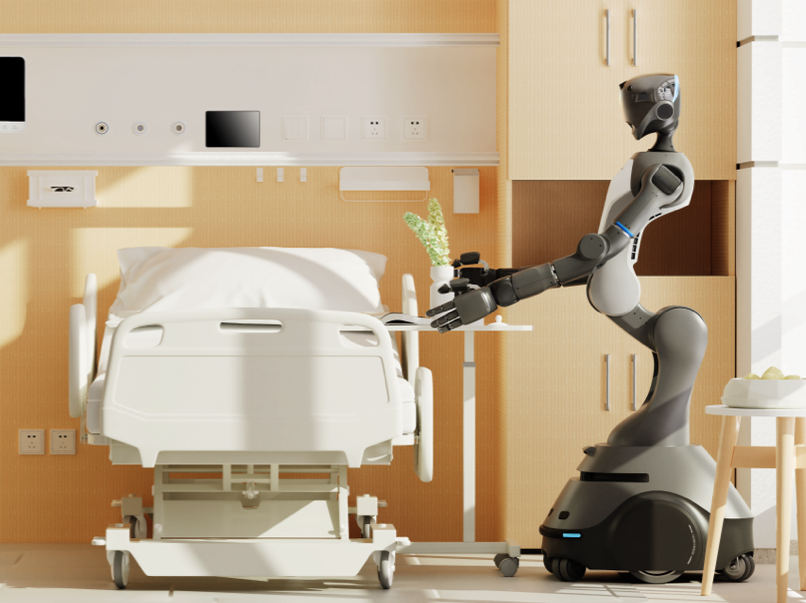
All-round environmental perception
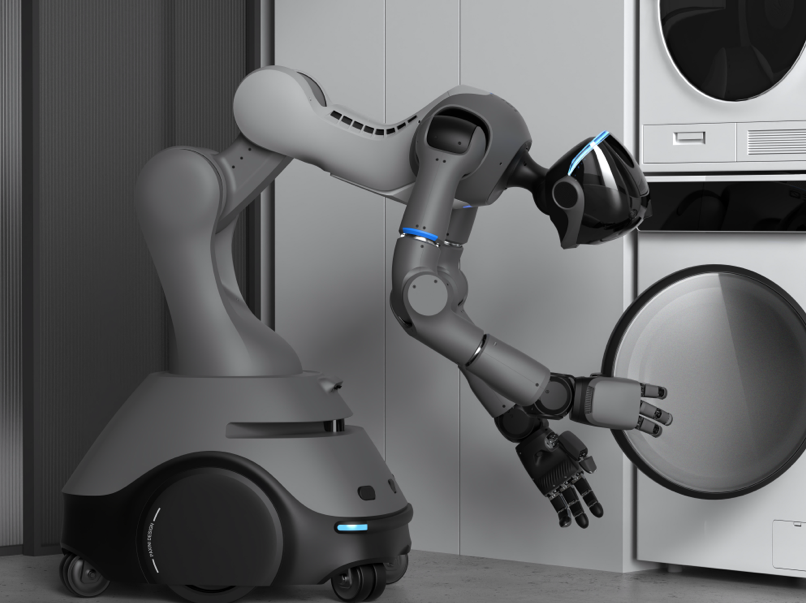
Operational capability
Precise and flexible operation



| Height | Deformable structure, waist folded 1.46 m, extended 1.86 m |
| Body Degrees of Freedom (excluding dexterous hands) | 21 |
| Bimanual Degrees of Freedom | 32 |
| Number of Fingers on Each Hand | 4 |
| Dexterous Hand Degrees of Freedom ( single hand ) | 16 DOF( 13 active + 3 passive ) |
| The Driving Mode of Dexterous Hand | Coreless motor |
| Tactile Perception | 2280 ITPU multi-dimensional tactile sensing units |
| Number of Tactile Signals | 6840 channels |
| Visual Capacity | 5 RGB cameras ( 3 in head + 1 in each hand ) + 2 RGBD cameras ( 1 in head + 1 in chassis ) |
| Arm Repeat Positioning Accuracy | ±0.5 mm |
| Single Arm (including dexterous hand) Straight-Arm Load Capacity | Rated 5 kg |
| Single Arm (including dexterous hand) Maximum Reach | 96.5 cm |
| Chassis Specifications | Maximum moving speed 0.6 m/s, maximum turning speed 0.4 rad/s, repeatability accuracy 1.5 cm, absolute accuracy 3 cm, heading angle error 3 degrees, obstacle crossing height 2 cm, ditch width 2 cm, climbing angle 7 degrees |
| Navigation Method | Laser SLAM autonomous navigation |
| Battery Capacity | 40 Ah |
| Charging Time | 6 h |
| Endurance | 8 h |
| Manufacturer | Paxini |
|---|---|
| Dimensions | 1860 x 540 x 710 |
| Weight | 200 |
| Material | Aluminum, Plastic |
| Degrees o Freedom (Total) | 53 |
| Degrees o Freedom (per Limb) | Body: 21 DOF / Dexterous: 32 DOF |
| Joint Types | Arm: rotary / Wrist: ball |
| Payload Capacity | 5 Kg |
| Locomotion Method | Wheeled |
| Walking Speed | 0.6m/s |
| Stair/Obstacle Handling | No |
| Balance Control System | No |
| Endurance | 4h (AGV chassis battery life) |
| Power Source | Battery |
| Battery Capacity | 40ah |
| Battery Life | 8h |
| Charging Time | 6h |
| Swappable Battery Support | No |
| RGB Camera | 5 |
| Stereo Vision | 2 |
| LiDAR | Yes |
| Depth Sensor | Yes |
| IR | Yes |
| IMU | 1 (in the base) |
| Gyroscope | IMU built in |
| Accelerometer | IMU built in |
| Force/Torque Sensors | No |
| Touch Sensors | Yes |
| Microphones / Audio Input | Yes |
| Other Sensors | Yes |
| Onboard Processor(s) | Yes |
| GPU / AI accelerator | Yes |
| Operating System / Middleware | ROS and SDK |
| Connectivity | Wifi, Ethernet |
| I/O Interfaces | Ethernet port, no other external hardware interfaces |
| Programming Languages Supported | Python, C/C++ |
| Development Frameworks | ROS, ROS2 |
| Simulation Support | Gazebo |
| AI/ML Capabilities | Supported |
| SDK Availability | Yes |
| Speech Recognition / TTS | Yes, additional cost |
| RR_humanoid_gesture | Hardware support (no software yet) |
| Facial Recognition | Hardware support (no software yet) |
| Display / Facial Expressions | Yes |
| Teleoperation / Remote Control Options | Yes |
| Safety Features | Support for collision detection |
| Emergency Stop Mechanism | Push button emergency stop and remote emergency stop |